




伺服驱动器结构
伺服驱动器通常包含控制器和功率放大器两大单元,实时跟踪系统上位机的运动控制指令;通过位置、速度、力矩等方式对伺服电机进行控制,实现高精度的传动系统定位。
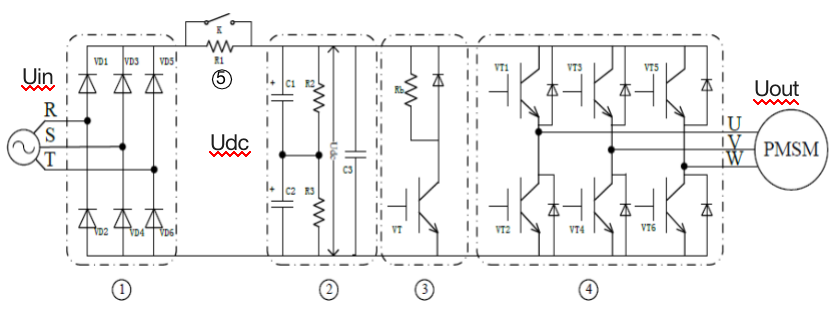
伺服驱动器的功率放大主回路如下图所示。
主电路各组成部分及功能
伺服驱动器,采用交-直交-工作方式,将工频输入(一般为50Hz),转为直流电,逆变输出为频率可变、电压可变的交流电。伺服驱动器一般包含了:整流环节、滤波环节、制动环节、逆变环节、上电缓冲环节。
1、整流环节:由六只整流功率二极管(VD1~VD6)组成三相整流桥,将电网侧的三相交流电全波整流成直流电。如电源的线电压为 Ul ,则三相全波整流后平均直流电压Ud的大小为:(Ud=1.35× Ul)我国三相电源的线电压为 380VAC,故全波整流后的平均电压:(Ud =1.35×380VAC=513VDC);经过滤波环节,母线电压波动较小,稳定在峰值537VDC左右。
2、滤波环节:由多个电解电容器组成,降低全波整流后的电压纹波,通过电解电容的滤波储能作用使整流输出的直流母线电压平稳;当负载变化时,使母线电压保持平稳。母线电容常常使用串联的方式使其耐压值符合电路设计要求(母线电压可达800VDC,而常规电解电容耐压值为400~450VDC)。
3、制动环节:由制动管 VT 和外接制动电阻Rb组成,在电机快速停止时(或反接发电工况时),消耗制动所产生的能量(即:当电机转子实际转速高于指令转速时将产生能量回馈,导致母线电压的泵升,这时需要制动环节将多余的能量消耗掉)。制动管VT 的额定电流大小跟驱动器的功率有关,在选择制动电阻阻值时需考虑制动功率的大小,以及制动管VT的电流能力。若电阻值过大,可能导致制动能量无法及时消耗,进而导致母线过压;若电阻值过小则存在损坏制动管VT的风险。
4、逆变环节:由六只 IGBT 和六只续流二极管组成。通过由伺服控制器产生的PWM信号驱动控制 IGBT 的开关顺序和开关时间,驱动器将直流电逆变输出频率可变、电压可变的交流电。
5、上电缓冲环节:由缓冲电阻 R1 与继电器K组成。驱动器上电时,滤波电容器相当于短路,瞬间产生极大的充电电流。过大的冲击电流将可能导致三相整流桥电路损坏。在驱动器刚上电时,为了保护整流桥,继电器K不闭合,电路内串入缓冲电阻 R1,以限制电容器的充电电流。当母线电压达到设定值,继电器K再吸合。
以上就是关于“伺服驱动器维修中主电路各组成部分及功能介绍”的全部内容,有需要的可以交流以及需要维修请与南京达尔信联系,我们是您身边的维修团队。
